Soft Grippers
Revolutionizing mobile manipulation by copying nature’s flexibility. Soft grippers let AGVs handle delicate, irregular, mixed inventory—rigid ones can’t touch that adaptability.

Core Concepts
Mechanical Compliance
Rigid claws don’t budge; soft grippers wrap around objects. This natural fit cuts the need for pinpoint sub-millimeter AGV positioning.
Fluidic Actuation
Most run on pneumatics or hydraulics inflating rubber chambers to curl fingers—lightweight perfection for mobile robots.
Material Science
Built from silicones, polymers, tech fabrics: food-safe, non-conductive, corrosion-proof right out of the gate.
Universal Grasping
One gripper grabs a lightbulb, flour bag, metal pipe—no tool swaps. Versatility like that is huge for mixed-SKU logistics.
Product Safety
Softness spreads force evenly, nixing damage to fragile items even in fast picks.
Energy Efficiency
Many work 'normally closed' or jamming—power just to switch states, not hold on.
How It Works
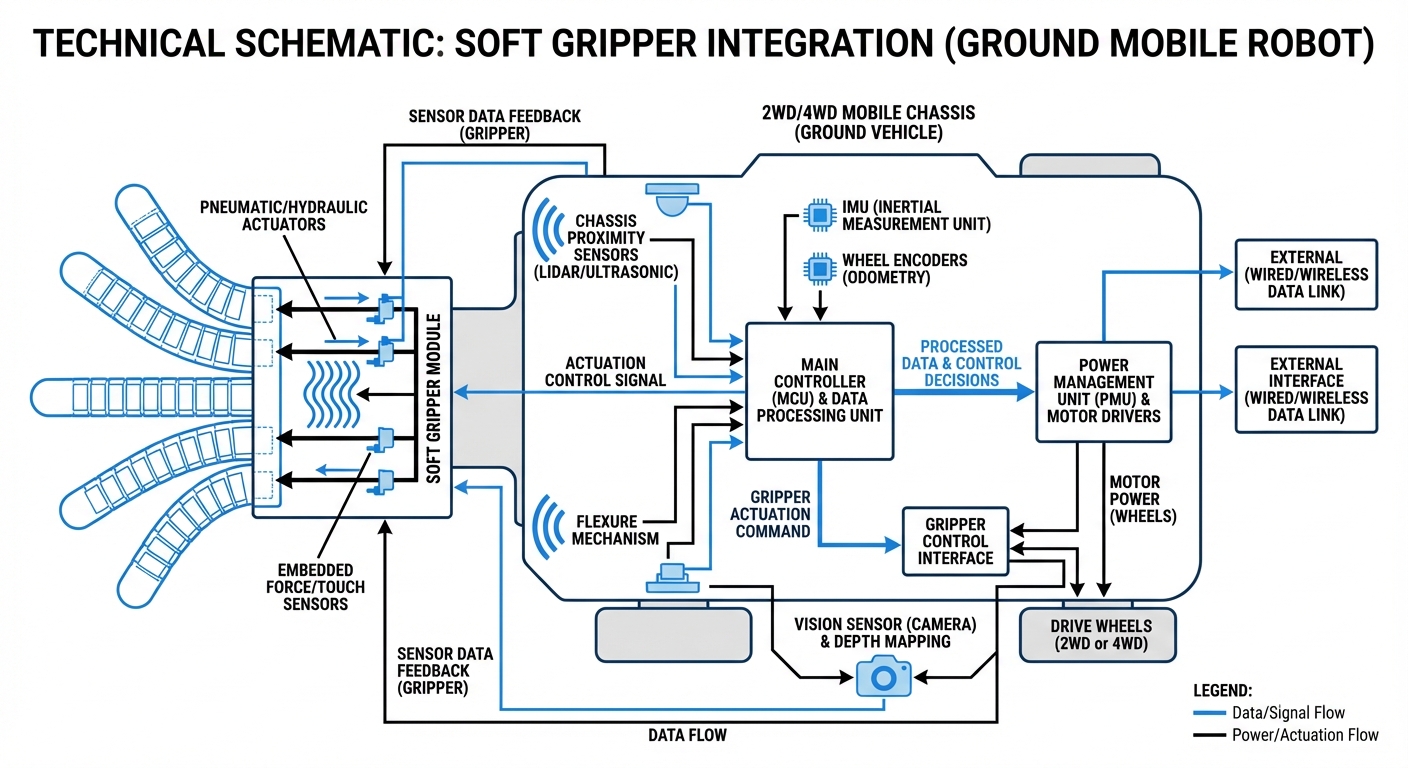
Soft robotic grippers break from traditional "hard" robotics which rely on precise kinematic chains and rigid links. Instead, they leverage . When pressurized air is introduced into the internal channels of the elastomer fingers, the asymmetry of the material's expansion causes the finger to bend.
This happens via . The inner layer won't stretch, outer is flexible. Pressure builds, finger curls in, hugs the object.
AGVs with manipulators love this—less compute load. No need for perfect 3D models; just get close. Gripper materials fine-tune, like hardware error-proofing.
Real-World Applications
E-Commerce & Logistics
Bin picking random shapes: lipstick tube then plush toy, no tool change—throughput jumps 40%.
Food Processing
Raw ingredients like dough, meat, produce: food-safe, easy-clean, no bruising berries or tomatoes.
Advanced Manufacturing
Polished/glass parts: soft silicone skips scratches metal grippers cause, slashes electronics scrap.
Laboratory Automation
Test tubes, petri dishes, delicate glassware: gentle secure grip handles wet/slippery surfaces for lab transport.
Frequently Asked Questions
What's the payload capacity of a standard soft gripper?
They're typically not as beefy as rigid grippers, but modern industrial soft grippers handle payloads from 2kg to 10kg, depending on the design. For heavy-duty logistics jobs, hybrid soft-rigid setups are popular—they blend serious lifting power with that gentle, adaptive grasp.
How tough are the silicone fingers in an industrial setting?
Industrial-grade soft grippers are built for millions of cycles. That said, they're vulnerable to cuts from sharp stuff like broken glass or sheet metal. In everyday warehouse packing or food handling, they usually last 6-12 months before a quick modular swap.
Do soft grippers need compressed air on the AGV?
Yep, usually. But you don't need massive industrial compressors. Most mobile manipulators pack small onboard mini-compressors or 24V electric vacuum pumps, powered straight from the AGV's battery—keeping everything super compact.
Can soft grippers handle wet or oily objects?
Absolutely. That's one of their biggest wins. Silicone's grippy friction plus the 'form closure'—where it wraps right around the object—beats metal grippers hands-down for slippery items in food processing or coolant-soaked machining.
How does picking speed stack up against vacuum suction cups?
Vacuum cups win on speed for flat, uniform boxes. Soft grippers take a bit longer (0.5s to 1.0s actuation), but they're way more reliable for irregular shapes where vacuum just won't seal, slashing those frustrating retries in your workflow.
Do I need force-torque sensors to prevent crushing items?
Generally, no. The pressure regulator caps the max force. Once inflated to that level, it can't push harder—making it super safe for fragile stuff like eggs or glass bulbs, no fancy sensors needed.
Do they work with standard robot arms like UR, Fanuc, or Kuka?
Totally. Most come with ISO-standard mounting flanges and protocols like Digital I/O, Modbus, or IO-Link, so they're plug-and-play with top cobot and industrial arm brands.
Can a soft gripper pick up something flat like a coin or card?
That's tricky for finger-style soft grippers. Smart designs add a 'fingernail' feature or pair the soft grip with a central vacuum cup to snag those hard-to-wrap flat items.
How does temperature affect performance?
Standard silicone grippers perform great from -10°C to 80°C. For extremes like freezers or ovens, you'll need special elastomer mixes to avoid brittleness or mushiness.
What is "Granular Jamming" in soft robotics?
Granular jamming uses a soft bag packed with grounds—like coffee or beads—pressed onto an object. Suck out the air, and the particles lock up rigid, molding perfectly around odd shapes. It's killer for heavy, irregular loads.