MQTT for IoT Robotics
Transform your fleet management with MQTT, the lightweight publish-subscribe protocol built for shaky networks. It delivers real-time chat between AGVs, mobile robots, and central controllers using tiny bandwidth and rock-solid reliability.

Core Concepts
Publish-Subscribe
It decouples robots (as clients) from the control system. Robots publish telemetry to a broker and subscribe to command topics for smooth, asynchronous communication.
Quality of Service (QoS)
It defines delivery guarantees: QoS 0 (at most once), QoS 1 (at least once), and QoS 2 (exactly once), letting you trade off latency for reliability.
Last Will & Testament
A key safety feature. If a robot drops off unexpectedly (like from battery failure or signal loss), the broker instantly notifies the fleet manager.
Low Bandwidth
Built for IoT, MQTT headers are just 2 bytes small. This saves battery life and punches through crowded Wi-Fi networks.
Topic Hierarchy
Organize communication logically (e.g., ). That way, you get precise subscriptions and smart data filtering.
Retained Messages
The broker holds onto the last known value for each topic. When a dashboard connects, it grabs the current status of every robot right away—no waiting for updates.
How It Works
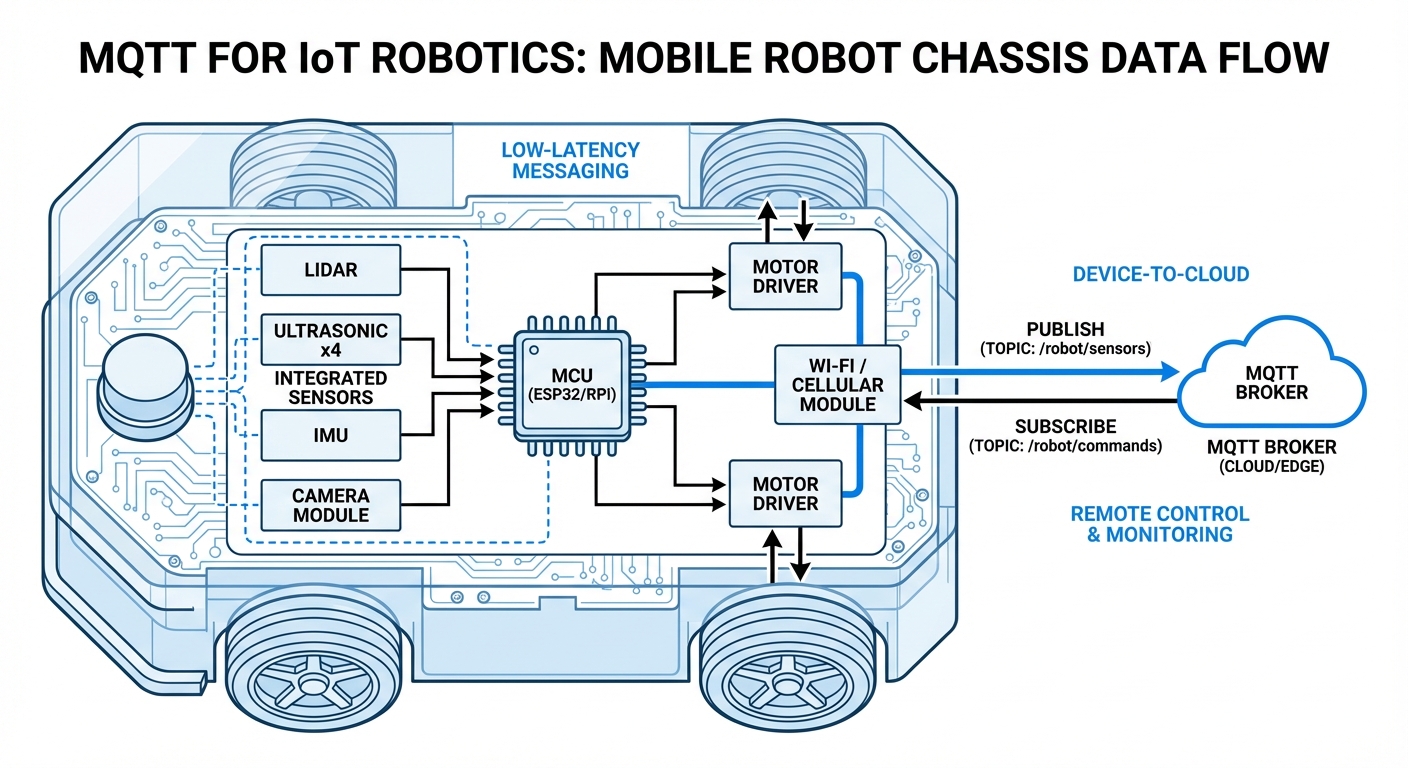
In a busy AGV setup, thousands of messages fly every second about positions, battery levels, and tasks. Unlike HTTP's back-and-forth requests, MQTT keeps a lightweight, always-on connection.
The central acts as the traffic controller. Robots publish telemetry to specific topics, and the Fleet Management System (FMS) subscribes to visualize the fleet. In turn, the FMS publishes commands that robots subscribe to.
This setup means even if the network wobbles as robots roam between Wi-Fi points, the connection snaps back instantly with no message loss (thanks to QoS 1 or 2), keeping operations humming.
Real-World Applications
Smart Warehousing
Goods-to-person robots rely on MQTT to sync moves in tight grids. Its low latency feeds collision avoidance systems fresh position data in real time.
Automated Manufacturing
AGVs hauling raw materials to assembly lines. MQTT plugs right into MES systems, kicking off transport only when machines signal "low stock."
Hospital Logistics
AMRs shuttling linens and meds. Retained messages let maintenance teams glance at a robot's current floor on their tablet dashboards.
Outdoor Agriculture
Field robots on cellular (4G/5G). MQTT's slim profile cuts data costs and copes with patchy coverage in far-off fields.
Frequently Asked Questions
Why choose MQTT over HTTP/REST for robotics?
HTTP's request-response model piles on headers and lag for every message. MQTT is event-driven with a persistent connection—perfect for mobile robots, slashing bandwidth by 80-90% and speeding up real-time reactions.
What happens if a robot rolls into a Wi-Fi dead zone?
With "Persistent Sessions" (cleanSession=false) and QoS 1 or 2, the broker queues up messages for the robot. When it reconnects, it gets all the missed commands instantly—no lost instructions while roaming.
How does MQTT ensure safety if a robot crashes?
This is covered by the "Last Will and Testament" (LWT) feature. On connect, the robot sets a message like "Status: Offline." If the link drops without a proper goodbye, the broker blasts that alert to the fleet manager right away.
Is MQTT secure enough for industrial environments?
Yes. MQTT runs on TCP/IP with TLS/SSL for encrypting data in flight. Brokers also handle username/password auth and ACLs to lock down topic access for specific robots.
Can MQTT handle big payloads like video or LIDAR data?
Usually not. It's tuned for small control messages and telemetry. For bandwidth hogs like video or point clouds, use MQTT for signaling and pair it with WebRTC or raw TCP/UDP for the data stream.
What's the best way to structure topics for a fleet?
Go hierarchical: start broad, drill down. Try `site_id/robot_type/robot_id/function`, like `warehouse_a/forklift/unit_42/battery_level`. Subscribe to `warehouse_a/+/+/battery_level` to track all batteries at once.
How scalable is an MQTT broker?
Incredibly scalable. Big brokers like EMQX or HiveMQ juggle millions of connections and tens of millions of messages per second. Even open-source Mosquitto handles thousands of robots on one server no sweat.
Which QoS for robot navigation commands?
For vital ones like "Stop Now," go QoS 1 (at least once) or 2 (exactly once) to guarantee delivery. For frequent telemetry like velocity (10x/sec), QoS 0 works fine—missing one isn't a crisis.
Should I use JSON for message payloads?
JSON's readable and debug-friendly, so it's the go-to. In super-tight bandwidth spots, switch to binary like Protobuf or MessagePack to shrink payloads big time.
How do I debug MQTT traffic?
Tools like MQTT Explorer are game-changers. They map out the topic tree, show retained messages, track live data, and let you fire test publishes to check robot responses.
Does MQTT support ROS (Robot Operating System)?
Yes, via bridges like `mqtt_bridge`. ROS nodes can publish and subscribe to MQTT topics, stretching ROS comms to external networks and the cloud.
What is the "Keep Alive" interval?
It's a timer (in seconds) that client and broker agree on. If no data flows, the client pings with PINGREQ to prove the link's alive. This kills "ghost" connections where a robot looks online but isn't.