GPS and GNSS Modules
Supercharge your mobile robots with global positioning. GPS and GNSS modules feed vital coords for effortless outdoor nav and fleet tracking across huge outdoor areas.

Core Concepts
GNSS vs. GPS
GPS is the US system, but GNSS pulls in all satellites – Galileo (EU), GLONASS (Russia), BeiDou (China) – for unbeatable global coverage.
RTK Accuracy
Real-Time Kinematic (RTK) pairs a fixed base with a rover to zap signal errors, shrinking accuracy from meters to centimeters for super-precise jobs.
Triangulation
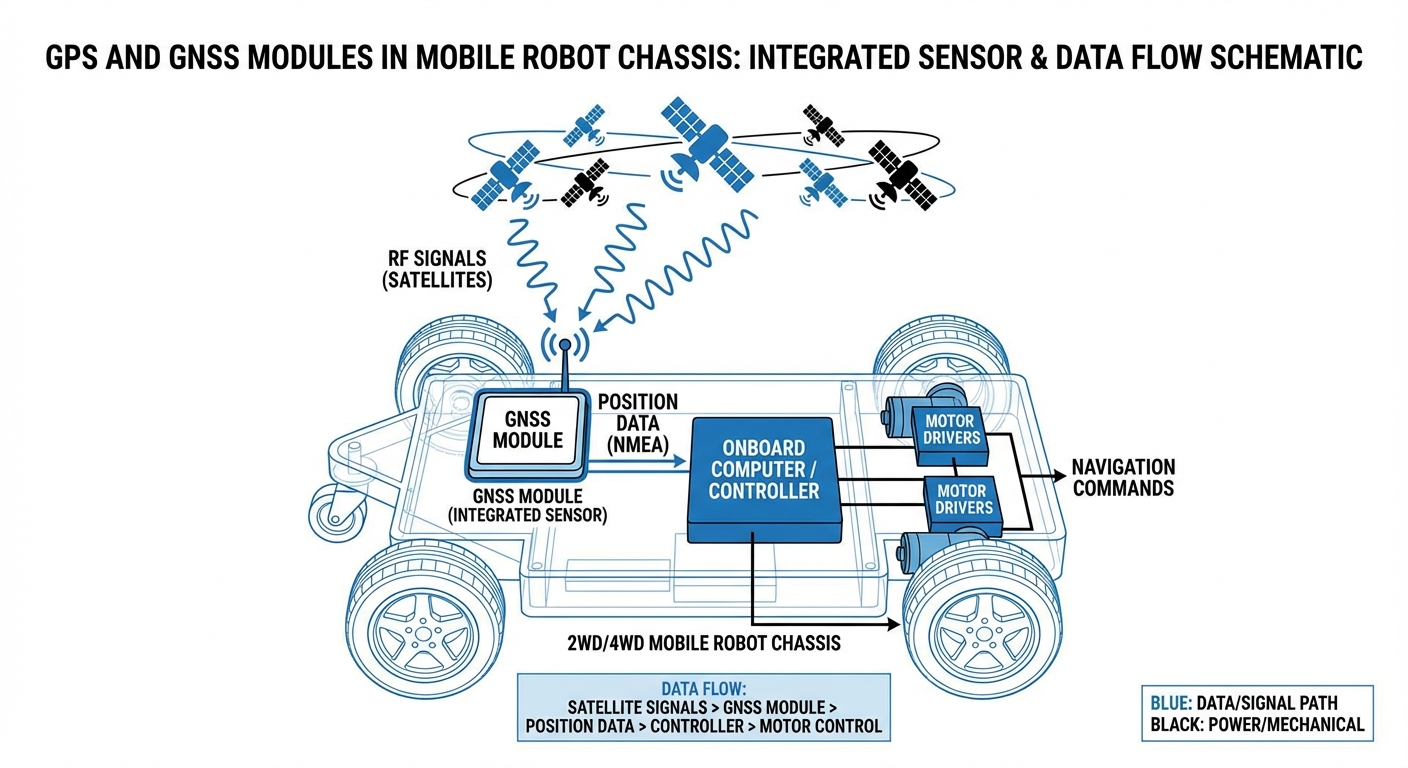
Receivers pinpoint position by clocking signal travel time from four+ satellites. Trilateration nails the 3D spot (lat, long, altitude) plus exact time.
NMEA Protocols
NMEA from the National Marine Electronics Association is the universal GPS data format. Robots decode strings like $GPGGA to snag location details.
Dead Reckoning
Lost signals in tunnels or indoors? Modules switch to Untethered Dead Reckoning (UDR), blending IMU data to track position till satellites reconnect.
Update Rate
For zippy AGVs, update rate (Hz) is key. Basic modules hit 1Hz, but robotics GNSS often crank 10-20Hz for silky-smooth control.
How It Works
GNSS satellites beam precise timing signals worldwide. Your AGV's receiver grabs them, measures time delays (flight time) for distances, and triangulates from four+ sats to lock exact Earth position.
Robot nav needs better than standard GPS (2-5m). That's where shines: GNSS anchors global position (no drift), while odometry and IMUs track every twitch.
Pro systems rock Dual-Band receivers (L1/L5) to fight urban signal bounces, holding steady near skyscrapers or trees where single-band flops.
Real-World Applications
Agriculture Automation
Autonomous tractors and harvesters lean on RTK-GNSS for sub-inch crop row tracking, slashing overlap, saving fuel, and pumping up yields – hands-free.
Last-Mile Delivery Robots
Sidewalk delivery rovers tap GNSS for waypoint hops from pickup to drop-off, flipping to cameras and LiDAR for pavement obstacle dodges.
Mining & Construction
Open-pit mines? Autonomous haul trucks use rugged GNSS to roam vast, shifting terrains sans roads or markers.
Inter-Logistics Transport
Campus AGVs blend GNSS for outdoor building jumps (outdoor mode) with SLAM or line-follow indoors for flawless material handoffs.
Frequently Asked Questions
What is the difference between Single-Band and Dual-Band GNSS?
Single-band (usually L1) chokes on city interference and bounces. Dual-band (L1+L5) corrects sky-layer glitches and ignores multipath, crushing tough spots.
Can GNSS modules work indoors?
Generally, no. Signals are too faint for concrete or steel roofs. Indoors, pivot to LiDAR, visual SLAM, or mag tape – though high-sens modules might snag a fuzzy read by windows.
What is the "Urban Canyon" effect?
City canyons with skyscrapers block sky views. Signals ricochet off buildings (multipath), faking position. Dual-band GNSS plus IMU fusion fights it back.
How much power does a GNSS module consume?
Standard GNSS modules sip power – 30-100mA at 3.3V. Active antennas or RTK add a bit, but it's peanuts next to motor draw in an AGV.
Why do I need an active antenna?
Passive antennas scrape by on faint space signals. Active ones pack a Low Noise Amplifier (LNA) from the module to boost before the cable run – vital for crisp robot signals.
What is Time-To-First-Fix (TTFF)?
TTFF is just how long it takes for a GNSS module to pinpoint its position right after powering up. A 'Cold Start' with no prior data can drag on for 30+ seconds, but a 'Hot Start' using saved almanac data nails it in just 1-2 seconds. That's why a battery backup is essential for those lightning-fast hot starts.
Is RTK expensive to implement?
It used to be expensive, but prices have plunged lately. All you need now is an RTK-capable rover module plus correction data—think NTRIP over 4G or a local LoRa base station. The hardware's become affordable even for mid-range commercial robots.
What is Dilution of Precision (DOP)?
DOP is a number that shows how well-spread the satellites are in the sky. If they're all bunched up in one spot, DOP is high (poor accuracy). Spread out nicely? DOP is low (great accuracy). Smart robots always filter their data using DOP thresholds.
How do I interface a GNSS module with a microcontroller?
Most modules talk via UART (serial). Just hook up the TX/RX pins and parse the ASCII NMEA data stream. Fancier ones might give you USB, I2C, or CAN bus for quicker rates or smoother integration with industrial PCs.
Can magnetic fields affect GPS?
Magnetic fields won't mess with the GPS signals themselves, but they throw off the built-in electronic compass (magnetometer) that many GNSS modules use for heading. Keep them clear of big motors and power lines.
What happens if the GPS signal is jammed?
Jamming kills your position fix. Tough autonomous systems have 'Fail-Safe' modes ready. If GNSS variance shoots up or satellites vanish, switch to visual odometry, stop safely, or lean on IMU dead-reckoning briefly.
What is the standard baud rate for GPS modules?
Default baud rate is usually 9600 bps, but that's way too sluggish for the 10Hz updates robotics needs. Pros always bump it to 38400 bps or 115200 bps right in the init sequence.