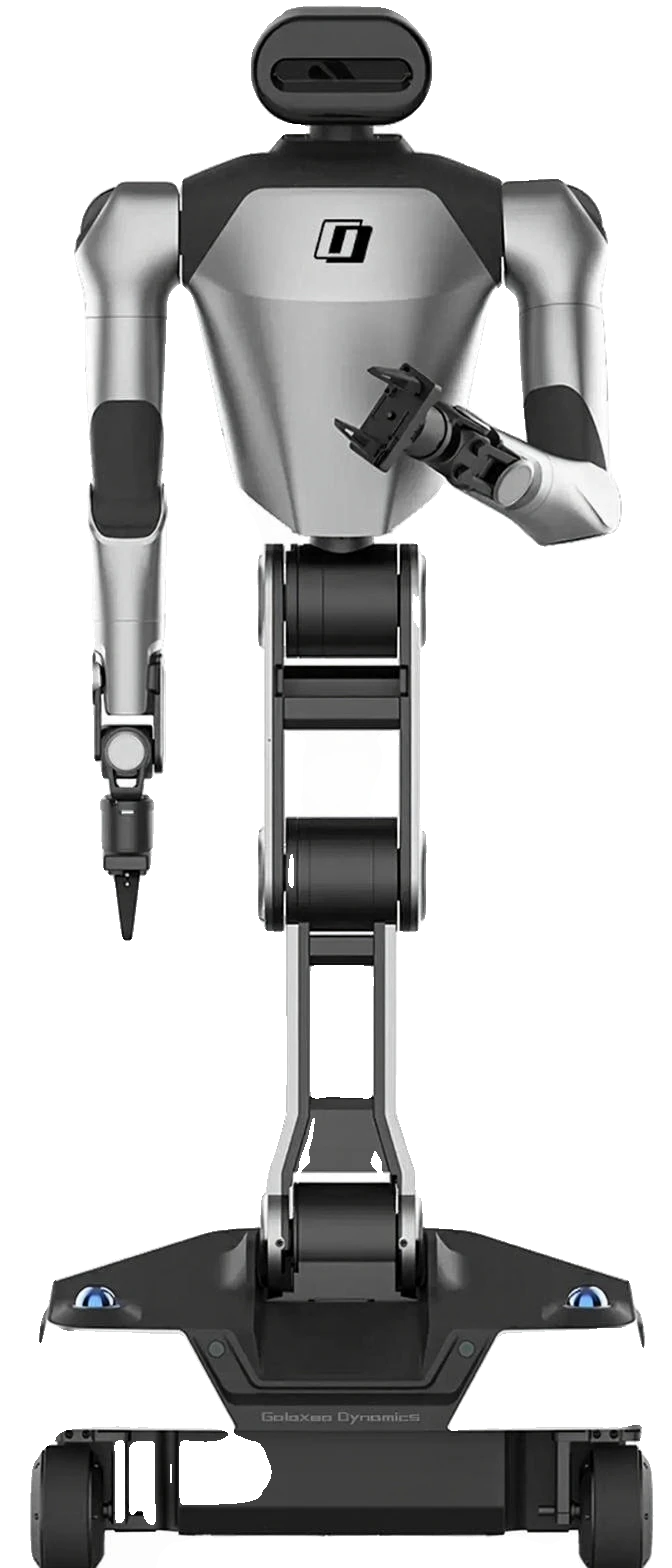
R1 PRO
R1 Pro is Galaxea Dynamics’ wheeled dual-arm humanoid robot built for research, industrial use, and robotics development – offering mobility, perception, and manipulation in a single platform.
Description
Key Features
High-DOF Bimanual Manipulation
Dual 7-DOF arms with 3.5 kg rated payload per arm enable complex, human-like dual-arm tasks like pick-and-place, assembly, and load handling with 0.5 mm precision.
Omnidirectional Mobility
6-DOF wheeled chassis achieves 1.5 m/s speed, smooth navigation in tight spaces via Ackerman/translation/spinning modes, supported by 360° LiDAR and multi-camera perception.
Advanced Onboard Compute
NVIDIA Jetson AGX Orin (up to 550 TOPS dual SOC) powers ROS2-based autonomy, VR teleop, and AI inference with <200 ms latency.
Rich Perception Suite
Binocular head cam, 5 chassis monos, optional wrist depth cams, and LiDAR provide 360° coverage for robust obstacle avoidance and manipulation.
Extensible Software Stack
Supports Isaac Sim simulation, ROS2 navigation/teleop, external LLM integration for embodied AI research and rapid prototyping.
Robust Power and Thermal
1680 Wh battery for 3h runtime, BMS, and dual air cooling ensure reliable operation in demanding environments.
Specifications
| Availability | In production |
|---|---|
| Nationality | China |
| Website | https://galaxea-dynamics.com/ |
| Degrees Of Freedom, Overall | 26 |
| Degrees Of Freedom, Hands | 7 |
| Height [Cm] | 170 |
| Manipulation Performance | 3 |
| Navigation Performance | 2 |
| Max Speed (Km/H) | 5.4 |
| Strength [Kg] | Rated 7 kg (dual-arm rated), maximum 10 kg total payload for dual arms |
| Weight [Kg] | 96 |
| Runtime Pr Charge (Hours) | 3 |
| Safe With Humans | Yes |
| Cpu/Gpu | NVIDIA Jetson AGX Orin 32 GB, 8-core CPU + 200 TOPS GPU |
| Ingress Protection | IP20 |
| Camera Resolution | Head: 1 binocular RGB camera; Chassis: 5 monocular cameras; 1 × 360° LiDAR standard; wrist cameras optional |
| Connectivity | Ethernet, HDMI, USB |
| Operating System | Linux (ROS2-based) |
| Llm Integration | External cloud connection possible; not native |
| Latency Glass To Action | <200ms (End-to-End) |
| Motor Tech | Servo motors (robotic-grade actuators) |
| Gear Tech | High-precision harmonic / planetary drives |
| Main Structural Material | Aluminum frame + composite panels |
| Number Of Fingers | Two parallel grippers (not individual fingers) — no anthropomorphic hand by default |
| Main Market | Industrial automation, Industrial R&D, research labs, Warehouse & logistics pick‑/place |
| Verified | Verified |
| Walking Speed [Km/H] | 5.4 |
| Shipping Size | 170 × 70 × 60 cm |
| Color | Grey |
| Manufacturer | Galaxea Dynamics |
| Dimensions | 1700 x 675 x (variable) mm (height x width) |
| Weight | 96 kg (with battery) |
| Dof Total | 26 |
| Dof Chassis | 6 |
| Dof Torso | 4 |
| Dof Arm Single | 7 |
| Arm Payload Rated | 3.5 kg @ 0.5-0.6 m |
| Arm Payload Max | 5 kg @ 0.5-0.6 m |
| Arm Reach | 680 mm (716 mm horizontal, 861 mm with gripper) |
| Max Speed | 1.5 m/s (5.4 km/h) |
| Vertical Range | 0-2000 mm |
| Compute | NVIDIA Jetson AGX Orin 32GB (single: 200 TOPS, 8-core CPU 2.2 GHz; dual: 550 TOPS) |
| Memory | 32 GB LPDDR5 (64 GB dual) |
| Storage | 1 TB SSD (single), 512 GB x2 (dual) |
| Os | Linux ROS2 |
| Sensors Head | 1x Binocular RGB (1920x1080@30fps, 110°H x70°V x120°D FOV, Orbbec or similar) |
| Sensors Chassis | 5x Monocular (1920x1080@30fps, 118°H x62°V FOV) |
| Sensors Wrist Opt | 2x Monocular Depth (1280x720@30fps, 87°H x58°V, 0.2-3m depth) |
| Sensors Lidar | 1-2x 360° (905 nm, 360°H x59°V, 0.1m blind, 100BASE-TX Ethernet, built-in IMU) |
| End Effector | Galaxea G1 parallel gripper (force-controlled) |
| Arms Model | Galaxea A2 (7 DOF, servo motors, harmonic/planetary gears) |
| Torso Torque | Rated 108 Nm, max 304 Nm |
| Battery | 48V 35 Ah Li-ion, 1680 Wh, BMS |
| Runtime | ~3 hours |
| Thermal | Dual low-noise air cooling, 82 m³/min flow |
| Connectivity | 4-6x GbE (M12), HDMI, USB 2.0, M.2 WiFi AP, 8x GMSL |
| Safety | Emergency stop, joystick 2.4G 1.5km range |
| Ip Rating | IP20 |
| Materials | Aluminum frame + composite panels |
Curated Videos