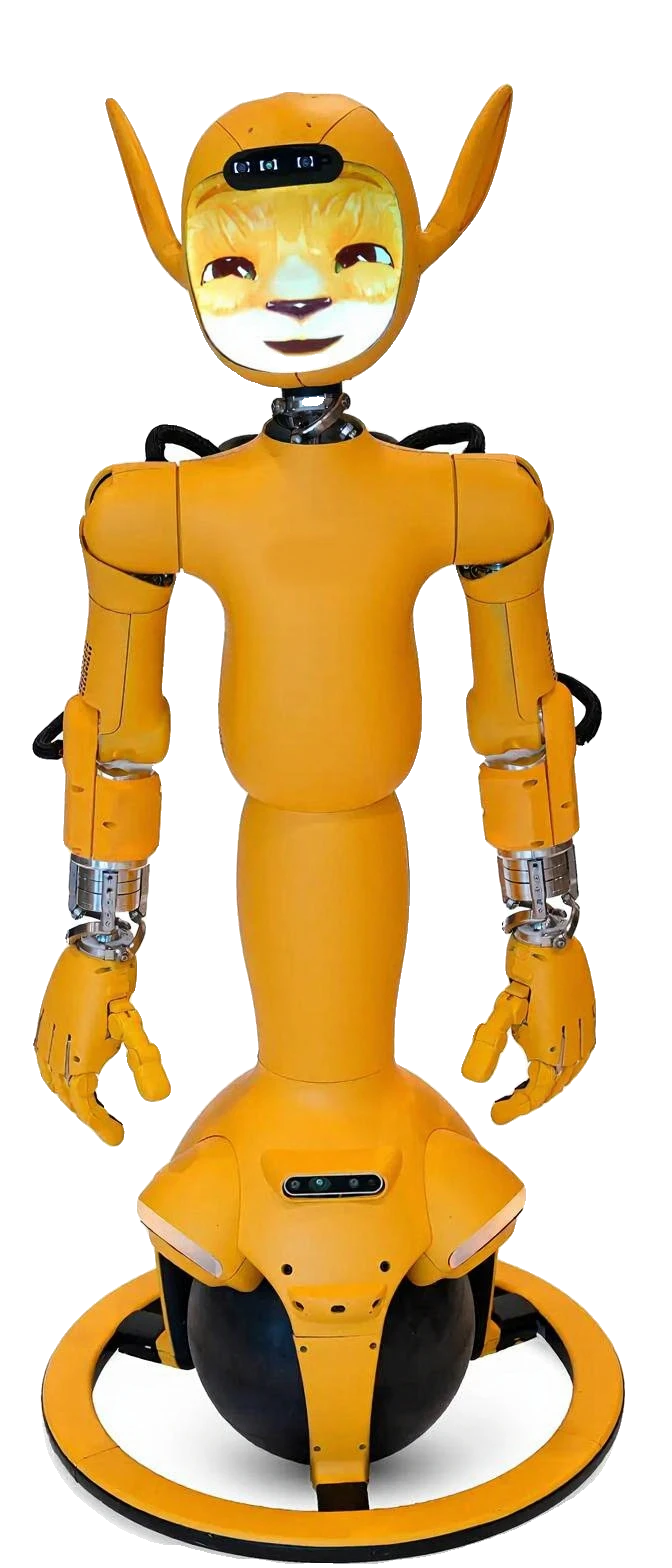
Mirokaï
Mirokaï robots from Enchanted Tools combine advanced AI, imaginative design, and innovative movement to create user-friendly robots that are as functional as they are engaging.
Description
Key Features
Ball-Bot Mobility
Patented rolling globe base with omnidirectional wheels enables fluid, agile navigation at 3 km/h in crowded human spaces using VSLAM and social awareness.
Expressive Facial Animation
Unity-powered 3D face with teeth, tongue, and real-time emotions (laugh, wink, grumpy) synced to speech prosody and gestures for empathetic interactions.
Multi-AI Interaction Stack
Agnostic multi-LLM, VLM, real-time multilingual speech, and GDPR face tracking for natural conversations and context-aware responses.
Compliant Manipulation
Torque-controlled arms (2x faster in ES) and grasping hands handle 1.5 kg payloads with AI-driven precision for logistics tasks.
360° Perception Suite
RGBD, ToF, ultrasonic, IMUs, and mics provide comprehensive sensing for safe, autonomous operation in dynamic environments.
NVIDIA-Powered Compute
Dual Jetson NX (upgradable GPU) on custom Linux supports low-latency AI inference, simulation, and developer API integration.
Specifications
| Availability | Prototype |
|---|---|
| Nationality | French |
| Website | https://enchanted.tools/ |
| Degrees Of Freedom, Overall | 26 |
| Degrees Of Freedom, Hands | 2 |
| Height [Cm] | 123 |
| Manipulation Performance | 2 |
| Navigation Performance | 2 |
| Max Speed (Km/H) | 3 |
| Strength [Kg] | 1.5 |
| Weight [Kg] | 29 |
| Runtime Pr Charge (Hours) | 4 |
| Safe With Humans | Yes |
| Cpu/Gpu | 2 |
| Ingress Protection | – |
| Camera Resolution | 1920×1080 |
| Connectivity | WiFi 2.4/5 GHz |
| Operating System | Custom Linux |
| Llm Integration | – |
| Latency Glass To Action | – |
| Motor Tech | brushless |
| Gear Tech | – |
| Main Structural Material | Aluminium |
| Number Of Fingers | 8 |
| Main Market | Social environments |
| Verified | Not verified |
| Manufacturer | Enchanted Tools |
| Height | 123 cm |
| Width | 52.5 cm |
| Weight | 29 kg |
| Dof Overall | 26 (Neck:3, Arms:4x2, Wrists:3x2, Hands:2x2, Ears:1x2, Base:3) |
| Max Speed | 3.2 km/h |
| Payload Strength | 1.5 kg |
| Runtime | 4-8 hours |
| Charging Time | 1 hour |
| Sensors | 2x RGBD cameras (1920x1080), 2x IR cameras, 9x ToF, 6x ultrasonic, 4x mics, 8x torque sensors, Hall/contact hand sensors, 3x IMUs, Bluetooth receiver |
| Compute | 2x NVIDIA Jetson NX (upgradable to advanced NVIDIA GPU) |
| Os | Custom Linux |
| Motors | 26 brushless (maxon drives), torque-controlled compliant actuators |
| Materials | Aluminum structure, plastic shell |
| Battery | Saft Li-ion high-capacity packs |
| Ai Stack | Multi-LLM, VLM, real-time speech recog/synth, VSLAM |
Curated Videos




