Atlas
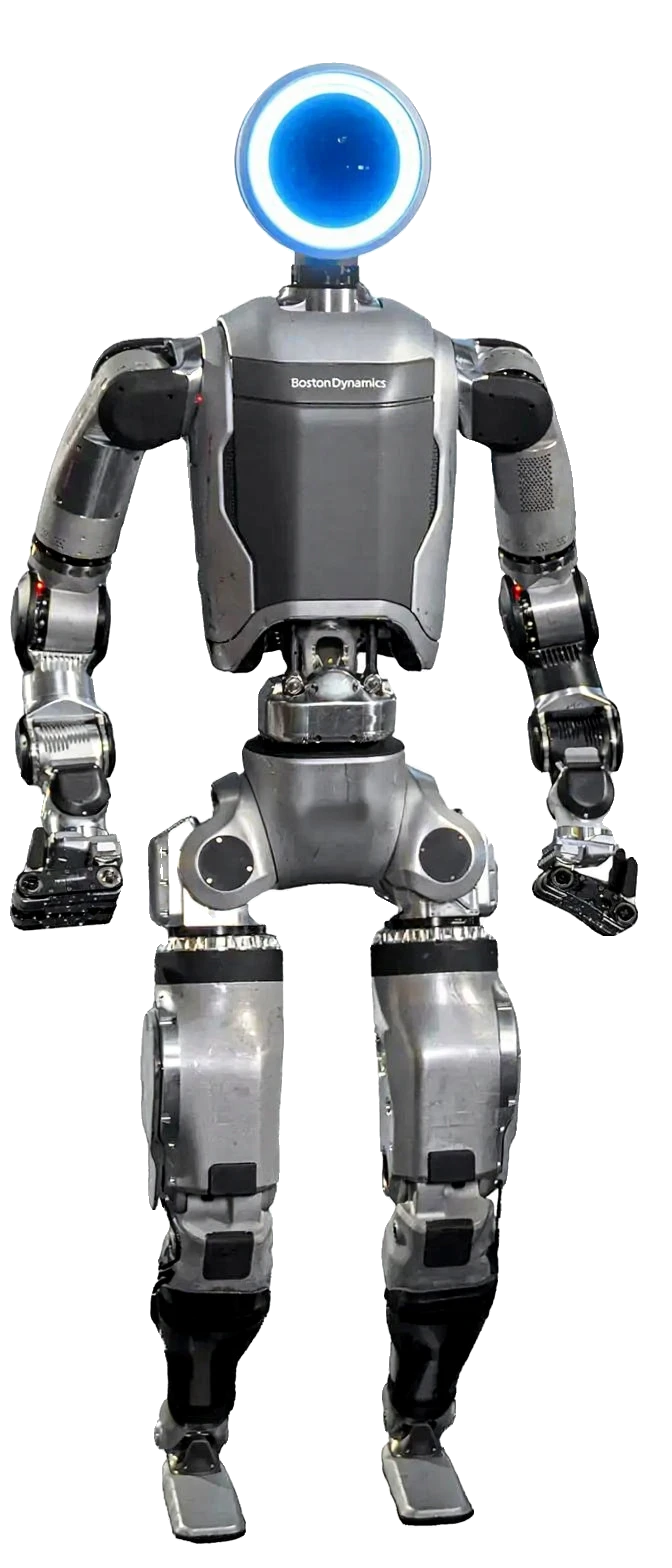
Atlas is an advanced humanoid robot developed by Boston Dynamics, a leading robotics company based in the United States. First unveiled in 2013, Atlas has undergone several iterations, with each new version pushing the boundaries of robotic capabilities.
Description
Key Features
Whole-Body Mobility and Manipulation
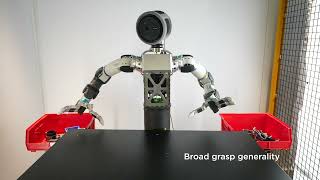
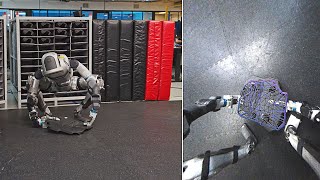
Atlas employs reinforcement learning and MPC for dynamic whole-body control, enabling parkour-level agility, squatting, wide stances, and bimanual handling of heavy, irregular objects exceeding human range of motion.
Advanced Perception System
Head-mounted cameras with 2D detection, keypoint localization, and SuperTracker pose estimation provide real-time 6-DoF object tracking, obstacle avoidance, and adaptation to factory environments.
Large Behavior Models (LBM)
450M parameter Diffusion Transformer policies, language-conditioned and end-to-end, execute complex multi-step tasks from natural language prompts at 30 Hz inference speed.
Electric Actuation and Lightweight Design
Fully electric actuators with custom high-power battery, titanium/aluminum 3D-printed frame deliver 220 Nm/kg torque density and 3+ hour runtime.
Dexterous Grippers
7 DoF per hand grippers support varied grasp strategies for rigid, deformable, and articulated objects, integrated with precise force feedback.
Specifications
| Availability | Prototype |
|---|---|
| Nationality | US |
| Website | https://bostondynamics.com/atlas/ |
| Degrees Of Freedom, Overall | 50 |
| Height [Cm] | 150 |
| Manipulation Performance | 3 |
| Navigation Performance | 3 |
| Max Speed (Km/H) | 9 |
| Strength [Kg] | 18 |
| Weight [Kg] | 89 |
| Runtime Pr Charge (Hours) | 3 |
| H.G Skill Score | 6 |
| Verified | Not verified |
| Walking Speed [Km/H] | 6 |
| Manufacturer | Boston Dynamics |
| Height Cm | 150 |
| Weight Kg | 89 |
| Dof Overall | 50 (full body); 28-29 (variants) |
| Dof Hands | 7 per gripper |
| Max Speed Kmh | 9 |
| Payload Kg | 18-25 |
| Runtime Hours | 3 |
| Materials | Titanium and aluminum 3D-printed parts |
| Actuators | Fully electric custom high-power |
| Sensors | Head-mounted monocular cameras, joint encoders, force/torque (optional) |
| Perception | 2D object detection, keypoint localization, SuperTracker 6-DoF pose estimation |
| Processors | Onboard compute for 30 Hz RL policies (specific GPU/CPU N/A) |
| Battery | Custom high-output, electric (kWh/voltage N/A) |
| Control | Model Predictive Control (MPC), Large Behavior Models (450M param Diffusion Transformer) |
| Torque Density | 220 Nm/kg |
Curated Videos