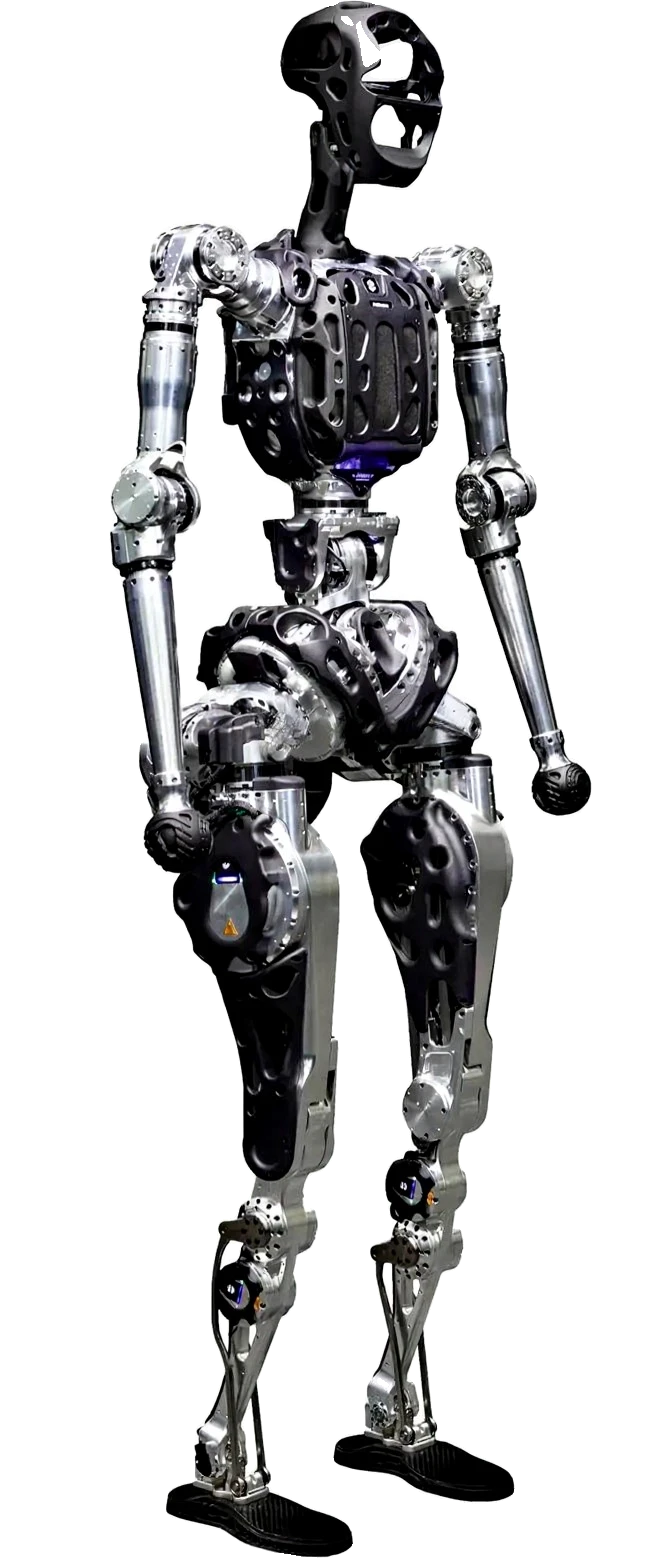
Adam Lite
PNDbotics Adam is a modular, stable, and AI-powered humanoid robot designed to set a universal standard for the robotics industry. Its open-source SDK and advanced AI algorithms enable developers to quickly build custom solutions while reducing costs. With powerful hardware and support for Nvidia’s DRL environment, Adam offers an efficient and flexible platform for both experts and newcomers in robotics development.
Description
Key Features
Modular Biomimetic Architecture
Fully modular QDD actuators and components enable easy customization, repairs, and scalability from prototype to production.
Advanced DRL Locomotion
Proprietary sim-to-real RL with human mocap imitation achieves natural walking, running, and terrain navigation with robustness to disturbances.
Open-Source Developer Platform
Supports NVIDIA Isaac Gym, open SDK for rapid AI training, testing, and deployment, reducing development costs.
High-Performance Hardware
25 force-controlled actuators with 340 Nm torque, Intel i7 compute, real-time RCU for precise whole-body control.
Multi-Modal Perception Ready
IMU and encoders standard; extensible to vision, hands for complex tasks in dynamic environments.
Specifications
| Availability | Prototype |
|---|---|
| Nationality | China |
| Website | http://N/A |
| Degrees Of Freedom, Overall | 25 |
| Height [Cm] | 160 |
| Manipulation Performance | 2 |
| Navigation Performance | 2 |
| Max Speed (Km/H) | 6 |
| Strength [Kg] | 5 |
| Weight [Kg] | 60 |
| Runtime Pr Charge (Hours) | 3 |
| H.G Skill Score | 4 |
| Verified | Not verified |
| Walking Speed [Km/H] | 4 |
| Manufacturer | PNDbotics |
| Height | 160 cm |
| Weight | 60 kg |
| Dof Overall | 25 |
| Dof Legs | 6 per leg (3 hip, 1 knee, 2 ankle) |
| Dof Arms | 5 per arm (3 shoulder, 2 elbow) |
| Dof Waist | 3 |
| Actuators | 25 QDD force-controlled PND actuators; legs: 4 high-torque (340 Nm max) |
| Compute | 12th gen Intel i7 NUC; PND RCU (integrates BMS, power mgmt, 16-port Gigabit Ethernet) |
| Sensors | IMU (linear/angular vel, gravity); joint encoders (pos/vel) |
| Max Speed | 6 km/h (walking 4 km/h) |
| Payload Strength | 5 kg |
| Battery | 3 hours runtime per charge; managed by BMS (voltage/kWh unspecified) |
| Materials | Modular engineering plastics/metal alloys (biomimetic skeleton; specifics N/A) |
| Thermal Management | N/A (actuator-integrated design for efficiency) |
| Os | Real-time Linux variant for RL policies |
| Connectivity | Gigabit Ethernet (PND Network); optional WiFi |
| Motor Tech | Integrated brushless motors with reducers |
| Gear Tech | Quasi-direct drive with harmonic/planetary reducers |
Curated Videos